Wie in [[Aufgaben:3.6_ONE-Transversalfilter|Aufgabe 3.6]] betrachten wir wieder den optimalen Nyquistentzerrer, wobei nun als Eingangsimpuls $g_x(t)$ eine beidseitig abfallende Exponentialfunktion anliegt:
As in [[Aufgaben:Exercise_3.6:_Transversal_Filter_of_the_Optimal_Nyquist_Equalizer|Exercise 3.6]] we consider again the optimal Nyquist equalizer.
*The input pulse $g_x(t)$ is a two-sided exponential function:
:$$g_x(t) = {\rm e }^{ - |t|/T}\hspace{0.05cm}.$$
:$$g_x(t) = {\rm e }^{ - |t|/T}\hspace{0.05cm}.$$
*Through a transversal filter of $N$–th order with the impulse response
Durch ein Transversalfilter $N$–ter Ordnung mit der Impulsantwort
:it is possible that the output pulse $g_y(t)$ has zero crossings at $t/T = ±1, \ \text{...} \ , \ t/T = ±N$, <br>while $g_y(t = 0) = 1$.
*However, in the general case, the precursors and trailers with $| \nu | > N$ lead to intersymbol interference.
ist es immer möglich, dass der Ausgangsimpuls $g_y(t)$ Nulldurchgänge bei $t/T = ±1, \ \text{...} \ , \ t/T = ±N$ aufweist und $g_y(t = 0) = 1$ ist. Im allgemeinen Fall führen dann allerdings die Vorläufer und Nachläufer mit $| \nu | > N$ zu Impulsinterferenzen.
''Hinweise:''
Note: The exercise belongs to the chapter [[Digital_Signal_Transmission/Linear_Nyquist_Equalization|"Linear Nyquist Equalization"]].
*Die Aufgabe gehört zum Kapitel [[Digitalsignal%C3%BCbertragung/Lineare_Nyquistentzerrung|Linare Nyquistentzerrung]].
*Sollte die Eingabe des Zahlenwertes „0” erforderlich sein, so geben Sie bitte „0.” ein.
===Fragebogen===
===Questions===
<quiz display=simple>
<quiz display=simple>
{Geben Sie die Signalwerte $g_x(\nu) = g_x(t = \nu T)$ bei Vielfachen von $T$ an.
{Give the signal values $g_x(\nu) = g_x(t = \nu T)$ at multiples of $T$.
|type="{}"}
|type="{}"}
$g_x(0)\ = \ $ { 1 3% }
$g_x(0)\ = \ $ { 1 3% }
Line 27:
Line 29:
$g_x(2)\ = \ $ { 0.135 3% }
$g_x(2)\ = \ $ { 0.135 3% }
{Berechnen Sie die optimalen Filterkoeffizienten für $N = 1$.
{Calculate the optimal filter coefficients for $N = 1$.
|type="{}"}
|type="{}"}
$k_0 \ = \ $ { 1.313 3% }
$k_0 \ = \ $ { 1.313 3% }
$k_1 \ = \ $ { -0.43775--0.41225 }
$k_1 \ = \ $ { -0.43775--0.41225 }
{Berechnen Sie die Ausgangswerte $g_2 = g_{\rm \nu}(t = 2T)$ und $g_3 = g_{\rm \nu}(t = 3T)$.
'''(2)''' According to [[Aufgaben:Exercise_3.6:_Transversal_Filter_of_the_Optimal_Nyquist_Equalizer|"solution to Exercise 3.6"]], we arrive at the following system of equations:
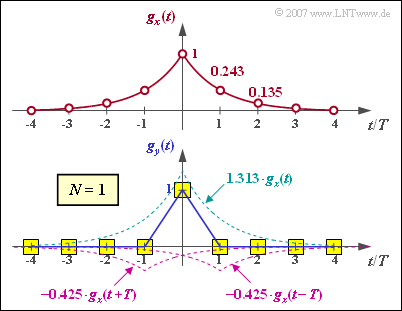
[[File:P_ID1440__Dig_Z_3_6_c.png|right|frame|Eingangsimpuls (oben), Ausgangsimpuls für <i>N</i> = 1 (unten)]]
Die Abbildung zeigt, dass bei diesem exponentiell abfallenden Impuls das Transversalfilter erster Ordnung eine vollständige Entzerrung bewirkt. Außerhalb des Intervalls $–T < t < T$ ist $g_y(t)$ identisch $0$, innerhalb ergibt sich eine Dreieckform.
'''(4)''' Only the <u>first statement</u> is correct:
*Since already with a first-order delay filter all precursors and trailers are compensated, also with a second-order filter and also for $N → ∞$ no further improvements result.
*However, '''this result applies exclusively to the (bilaterally) exponentially decaying input pulse'''.
'''(4)''' Richtig ist nur der <u>erste Lösungsvorschlag</u>:
*For almost any other pulse shape, the larger $N$ is, the better the result.
*Nachdem bereits mit einem Laufzeitfilter erster Ordnung alle Vor– und Nachläufer kompensiert werden, ergeben sich auch mit einem Filter zweiter Ordnung und auch für $N → ∞$ keine weiteren Verbesserungen.
*Dieses Ergebnis gilt jedoch ausschließlich für den (beidseitig) exponentiell abfallenden Eingansgimpuls.
*Bei fast jeder anderen Impulsform ist das Ergebnis um so besser, je größer $N$ ist.
{{ML-Fuß}}
{{ML-Fuß}}
[[Category:Aufgaben zu Digitalsignalübertragung|^3.5 Lineare Nyquistentzerrung^]]
[[Category:Digital Signal Transmission: Exercises|^3.5 Linear Nyquist Equalization^]]
[[de:Aufgaben:Aufgabe 3.6Z: Optimaler Nyquistentzerrer für Exponentialimpuls]]
The figure shows that for this exponentially decaying pulse, the first-order transversal filter provides complete equalization.
Outside the interval $-T < t < T$, $g_y(t)$ is identically zero.
Inside it results in a triangular shape.
(4) Only the first statement is correct:
Since already with a first-order delay filter all precursors and trailers are compensated, also with a second-order filter and also for $N → ∞$ no further improvements result.
However, this result applies exclusively to the (bilaterally) exponentially decaying input pulse.
For almost any other pulse shape, the larger $N$ is, the better the result.