Obwohl die Beschreibung Gaußscher Zufallsgrößen mit Hilfe von Vektoren und Matrizen eigentlich nur bei mehr als $N = 2$ Dimensionen erforderlich ist und Sinn macht, beschränken wir uns hier zur Vereinfachung auf den Sonderfall zweidimensionaler Zufallsgrößen.
Although the description of Gaussian random variables using vectors and matrices is actually only necessary and makes sense for more than $N = 2$ dimensions, here we restrict ourselves to the special case of two-dimensional random variables for simplicity.
In der Grafik ist oben die allgemeine Korrelationsmatrix $\mathbf{K_x}$ der 2D–Zufallsgröße $\mathbf{x} = (x_1, x_2)^{\rm T}$ angegeben, wobei $\sigma_1^2$ und $\sigma_2^2$ die Varianzen der Einzelkomponenten beschreiben. $\rho$ bezeichnet den Korrelationskoeffizienten zwischen den beiden Komponenten.
In the graph above, the general correlation matrix $\mathbf{K_x}$ of the two-dimensional random variable $\mathbf{x} = (x_1, x_2)^{\rm T}$ is given, where $\sigma_1^2$ and $\sigma_2^2$ describe the variances of the individual components. $\rho$ denotes the correlation coefficient between the two components.
Die Zufallsgrößen $\mathbf{y}$ und $\mathbf{z}$ geben zwei Spezialfälle von $\mathbf{x}$ an, deren Prozessparameter aus den Korrelationsmatrix $\mathbf{K_y}$ bzw. $\mathbf{K_z}$ bestimmt werden sollen.
The random variables $\mathbf{y}$ and $\mathbf{z}$ give two special cases of $\mathbf{x}$ whose process parameters are to be determined from the correlation matrices $\mathbf{K_y}$ and $\mathbf{K_z}$ respectively.
Line 15:
Line 15:
Hints:
*The exercise belongs to the chapter [[Theory_of_Stochastic_Signals/Generalization_to_N-Dimensional_Random_Variables|Generalization to N-Dimensional Random Variables]].
*Some basics on the application of vectors and matrices can be found on the pages [[Theory_of_Stochastic_Signals/Generalization_to_N-Dimensional_Random_Variables#Basics_of_matrix_operations:_Determinant_of_a_matrix|Determinant of a Matrix]] and [[Theory_of_Stochastic_Signals/Generalization_to_N-Dimensional_Random_Variables#Basics_of_matrix_operations:_Inverse_of_a_matrix|Inverse of a Matrix]] .
* According to the page [[Theory_of_Stochastic_Signals/Two-Dimensional_Gaussian_Random_Variables#Contour_lines_for_correlated_random_variables|"Contour lines for correlated random variables"]] the angle $\alpha$ between the old and the new system is given by the following equation:
**A $2×2$-covariance matrix has two real eigenvalues $\lambda_1$ and $\lambda_2$.
**These two eigenvalues determine two eigenvectors $\xi_1$ and $\xi_2$.
**These span a new coordinate system in the direction of the principal axes of the old system.
===Questions===
''Hinweise:''
*Die Aufgabe gehört zum Kapitel [[Theory_of_Stochastic_Signals/Verallgemeinerung_auf_N-dimensionale_Zufallsgrößen|Verallgemeinerung auf N-dimensionale Zufallsgrößen]].
*Einige Grundlagen zur Anwendung von Vektoren und Matrizen finden sich auf den Seiten [[Theory_of_Stochastic_Signals/Verallgemeinerung_auf_N-dimensionale_Zufallsgrößen#Grundlagen_der_Matrizenrechnung:_Determinante_einer_Matrix|Determinante einer Matrix]] sowie [[Theory_of_Stochastic_Signals/Verallgemeinerung_auf_N-dimensionale_Zufallsgrößen#Grundlagen_der_Matrizenrechnung:_Inverse_einer_Matrix|Inverse einer Matrix]].
* Entsprechend der Seite [[Theory_of_Stochastic_Signals/Zweidimensionale_Gaußsche_Zufallsgrößen#H.C3.B6henlinien_bei_korrelierten_Zufallsgr.C3.B6.C3.9Fen|Höhenlinien bei korrelierten Zufallsgrößen]] ist der Winkel $\alpha$ zwischen dem alten und dem neuen System durch folgende Gleichung gegeben:
{Geben Sie die Eigenwerte von $\mathbf{K_y}$ unter der Bedingung $\sigma = 1$ sowie $0 < \rho < 1$ an. Welche Werte ergeben sich für $\rho = 0.5 $, wobei $\lambda_1 \ge \lambda_2$ vorausgesetzt wird?
{Give the eigenvalues of $\mathbf{K_y}$ under the condition $\sigma = 1$ and $0 < \rho < 1$ What values result for $\rho = 0.5 $, assuming $\lambda_1 \ge \lambda_2$?
{Berechnen Sie die zugehörigen Eigenvektoren $\mathbf{\eta_1}$ und $\mathbf{\eta_2}$. Welche der folgenden Aussagen sind zutreffend?
{Calculate the corresponding eigenvectors $\mathbf{\eta_1}$ and $\mathbf{\eta_2}$. Which of the following statements are true?
|type="[]"}
|type="[]"}
+ $\mathbf{\eta_1}$ und $\mathbf{\eta_2}$ liegen in Richtung der Ellipsenhauptachsen.
+ $\mathbf{\eta_1}$ and $\mathbf{\eta_2}$ lie in the direction of the ellipse main axes.
+ Die neuen Koordinaten sind um $45^\circ$ gedreht.
+ The new coordinates are rotated by $45^\circ$.
- Die Streuungen bezüglich des neuen Systems sind $\lambda_1$ und $\lambda_2$.
- The standard deviations with respect to the new system are $\lambda_1$ and $\lambda_2$.
{Wie lauten die Kenngrößen der durch $\mathbf{K_z}$ festgelegten Zufallsgröße $\mathbf{z}$?
{What are the characteristics of the random variable $\mathbf{z}$ specified by $\mathbf{K_z}$?
|type="{}"}
|type="{}"}
$\sigma_1 = \ $ { 2 3% }
$\sigma_1 = \ $ { 2 3% }
Line 68:
Line 63:
{Berechnen Sie die Eigenwerte $\lambda_1$ und $\lambda_2 \le \lambda_1$ der Korrelationsmatrix $\mathbf{K_z}$.
{Calculate the eigenvalues $\lambda_1$ and $\lambda_2 \le \lambda_1$ of the correlation matrix $\mathbf{K_z}$.
{Um welchen Winkel $\alpha$ ist das neue Koordinatensystem $(\mathbf{\zeta_1}, \ \mathbf{\zeta_2})$ gegenüber dem ursprünglichen System $(\mathbf{z_1}, \ \mathbf{z_2})$ gedreht?
{By what angle $\alpha$ is the new coordinate system $(\mathbf{\zeta_1}, \ \mathbf{\zeta_2})$ rotated with respect to the original system $(\mathbf{z_1}, \ \mathbf{z_2})$ ?
|type="{}"}
|type="{}"}
$\alpha \ = \ $ { 26.56 3% } $\ \rm Grad$
$\alpha \ = \ $ { 26.56 3% } $\ \rm deg$
Line 82:
Line 77:
</quiz>
</quiz>
===Musterlösung===
===Solution===
{{ML-Kopf}}
{{ML-Kopf}}
'''(1)''' Richtig sind <u>die Lösungsvorschläge 1 und 2</u>:
'''(1)''' Correct are the <u>proposed solutions 1 and 2</u>:
*$\mathbf{K_y}$ ist tatsächlich die allgemeinste Korrelationsmatrix einer 2D-Zufallsgröße mit $\sigma_1 = \sigma_2 = \sigma$.
*$\mathbf{K_y}$ is indeed the most general correlation matrix of a two-dimensional random variable with $\sigma_1 = \sigma_2 = \sigma$.
*Der Parameter $\rho$ gibt den Korrelationskoeffizienten an. Dieser kann alle Werte zwischen $\pm 1$ inclusive dieser Randwerte annehmen.
*The parameter $\rho$ specifies the correlation coefficient. This can take all values between $\pm 1$ including these marginal values.
'''(2)''' In diesem Fall lautet die Bestimmungsgleichung:
'''(2)''' In this case, the governing equation is:
'''(4)''' Die Eigenvektoren erhält man durch Einsetzen der Eigenwerte $\lambda_1$ und $\lambda_2$ in die Korrelationsmatrix:
The eigenvectors are obtained by substituting the eigenvalues $\lambda_1$ and $\lambda_2$ into the correlation matrix:
*Das durch $\mathbf{\eta_1}$ und $\mathbf{\eta_2}$ festgelegte Koordinatensystem liegt tatsächlich in Richtung der Hauptachsen des ursprünglichen Systems.
*Die Eigenwerte $\lambda_1$ und $\lambda_2$ kennzeichnen nicht die Streuungen bezüglich der neuen Achsen, sondern die Varianzen.
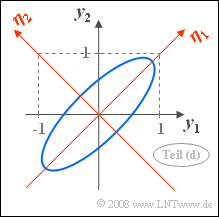
The sketch illustrates the result:
*The coordinate system defined by $\mathbf{\eta_1}$ and $\mathbf{\eta_2}$ is actually in the direction of the main axes of the original system.
*With $\sigma_1 = \sigma_2$ almost always results $($exception: $\rho= 0)$ the rotation angle $\alpha = 45^\circ$.
*This also follows from the equation given in the theory section:
*The eigenvalues $\lambda_1$ and $\lambda_2$ do not denote the standard deviations with respect to the new axes, but the variances.
Richtig sind also <u>die Lösungsvorschläge 1 und 2</u>.
'''(5)''' Durch Vergleich der Matrizen $\mathbf{K_x}$ und $\mathbf{K_z}$ erhält man
'''(5)''' By comparing the matrices $\mathbf{K_x}$ and $\mathbf{K_z}$ we get.
*$\sigma_{1}\hspace{0.15cm}\underline{ =2}$,
*$\sigma_{1}\hspace{0.15cm}\underline{ =2}$,
*$\sigma_{2}\hspace{0.15cm}\underline{ =1}$,
*$\sigma_{2}\hspace{0.15cm}\underline{ =1}$,
Line 184:
Line 121:
'''(6)''' Nach dem inzwischen altbekannten Schema gilt:
'''(6)''' According to the now familiar scheme:
Although the description of Gaussian random variables using vectors and matrices is actually only necessary and makes sense for more than $N = 2$ dimensions, here we restrict ourselves to the special case of two-dimensional random variables for simplicity.
In the graph above, the general correlation matrix $\mathbf{K_x}$ of the two-dimensional random variable $\mathbf{x} = (x_1, x_2)^{\rm T}$ is given, where $\sigma_1^2$ and $\sigma_2^2$ describe the variances of the individual components. $\rho$ denotes the correlation coefficient between the two components.
The random variables $\mathbf{y}$ and $\mathbf{z}$ give two special cases of $\mathbf{x}$ whose process parameters are to be determined from the correlation matrices $\mathbf{K_y}$ and $\mathbf{K_z}$ respectively.