Die Verzögerung auf dem Nebenpfad sei $τ = 1 μs$. Darunter gezeichnet ist die Struktur eines RAKE–Empfängers (grüne Hinterlegung) mit den allgemeinen Koeffizienten $K, h_0, h_1, τ_0$ und $τ_1$.
Let the delay on the secondary path be $τ = 1 \ \rm µ s$.
Der RAKE–Empfänger hat die Aufgabe, die Energie der beiden Signalpfade zu bündeln und dadurch die Entscheidung sicherer zu machen. Die gemeinsame Impulsantwort von Kanal und RAKE–Empfänger kann in der Form
Drawn below is the structure of a rake receiver (green background) with general coefficients $K$, $h_0$, $h_1$, $τ_0$ and $τ_1$.
angegeben werden, allerdings nur dann, wenn die RAKE–Koeffizienten $h_0$, $h_1$, $τ_0$ und $τ_1$ geeignet gewählt werden. Der Hauptanteil von $h_{KR}(t)$ soll bei $t = τ$ liegen.
Die Konstante K ist so zu wählen, dass die Amplitude des Hauptpfads $A_1 = 1$ ist:
*The purpose of the rake receiver is to combine the energy of the two signal paths, making the decision more reliable.
$$K= \frac{1}{h_0^2 + h_1^2}.$$
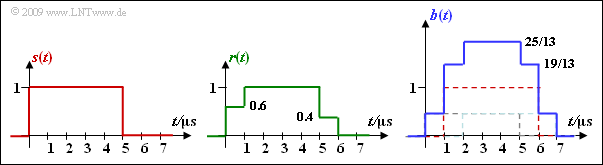
Gesucht sind außer den geeigneten RAKE–Parametern auch die Signale $r(t)$ und $b(t)$, wenn $s(t)$ ein Rechteck der Höhe 1 und der Breite $T = 5 μs$ ist.
'''Hinweis:''' Die Aufgabe bezieht sich auf der [http://en.lntwww.de/Modulationsverfahren/Fehlerwahrscheinlichkeit_der_PN%E2%80%93Modulation#Untersuchungen_zum_RAKE.E2.80.93Empf.C3.A4nger_.282.29 Untersuchungen zum RAKE–Empfänger] von [http://en.lntwww.de/Modulationsverfahren/Fehlerwahrscheinlichkeit_der_PN%E2%80%93Modulation Kapitel 5.4].
*The combined impulse response of the channel (German: "Kanal" ⇒ subscript "K") and the rake receiver can be expressed in the form
:but only if the rake coefficients $h_0$, $h_1$, $τ_0$ and $τ_1$ are appropriately chosen.
*The main part of $h_{\rm KR}(t)$ is supposed to be at $t = τ$.
*The constant $K$ is to be chosen so that the amplitude of the main path $A_1 = 1$ :
:$$K= \frac{1}{h_0^2 + h_1^2}.$$
Apart from the rake parameters, the signals $r(t)$ and $b(t)$ are sought when $s(t)$ is a rectangle of height $s_0 = 1$ and width $T = \ \rm 5 µ s$.
===Fragebogen===
Notes:
*The exercise belongs to the chapter [[Modulation_Methods/Error_Probability_of_Direct-Sequence_Spread_Spectrum_Modulation|Error Probability of Direct-Sequence Spread Spectrum Modulation]].
*Reference is made in particular to the section [[Modulation_Methods/Error_Probability_of_Direct-Sequence_Spread_Spectrum_Modulation#Principle_of_the_rake_receiver |Principle of the rake receiver]].
===Questions===
<quiz display=simple>
<quiz display=simple>
{Multiple-Choice Frage
{Which statements are valid for the channel impulse response $h_{\rm K}(t)$?
|type="[]"}
|type="[]"}
- Falsch
+ $h_{\rm K}(t)$ consists of two Dirac delta functions.
+ Richtig
- $h_{\rm K}(t)$ is complex-valued.
- $h_{\rm K}(t)$ is a function periodic with delay time $\tau$.
{Which statements are true for the channel frequency response $H_{\rm K}(f)$?
|type="[]"}
- $H_{\rm K}(f = 0) = 2$ is true.
+ $H_{\rm K}(f)$ is complex-valued.
+ $|H_{\rm K}(f)|$ is a function periodic with frequency $1/τ$.
{Input-Box Frage
{Set $K = 1$, $h_0 = 0.6$ and $h_1 = 0.4$. Determine the delays $τ_0$ and $τ_1$ so that the $h_{\rm KR}(t)$ equation is satisfied with $A_0 = A_2$.
|type="{}"}
|type="{}"}
$\alpha$ = { 0.3 }
$τ_0 \ = \ $ { 1 3% } $\ \rm µ s$
$τ_1 \ = \ $ { 0. } $\ \rm µ s$
{What value should be chosen for the constant $K$?
|type="{}"}
$K \ = \ $ { 1.923 3% }
{Which statements are valid for the signals $r(t)$ and $b(t)$?
|type="[]"}
+ The maximum value of $r(t)$ is $1$.
- The width of $r(t)$ is $7 \ µ s$.
- The maximum value of $b(t)$ is $1$.
+ The width of $b(t)$ is $7 \ µ s$.
Line 37:
Line 65:
</quiz>
</quiz>
===Musterlösung===
===Solution===
{{ML-Kopf}}
{{ML-Kopf}}
'''1.'''
'''(1)''' <u>Solution 1</u> is correct:
'''2.'''
*The impulse response $h_{\rm K}(t)$ is obtained as the received signal $r(t)$ when there is a Dirac delta pulse at the input ⇒ $s(t) = δ(t)$. It follows that:
'''(2)''' <u>Solutions 2 and 3</u> are correct:
'''7.'''
*By definition, the channel frequency response $H_{\rm K}(f)$ is the Fourier transform of the impulse response $h_{\rm K}(t)$. With the shift theorem this results in:
*For $f = 0$, $|H_{\rm K}(f)| = 1$. This value is repeated in the respective frequency spacing $1/τ$.
'''(3)''' We first set $K = 1$ as agreed.
*Altogether we get from $s(t)$ to the output signal $b(t)$ via four paths.
*To satisfy the given $h_{\rm KR}(t)$ equation, either $τ_0 = 0$ must hold or $τ_1 = 0$. With $τ_0 = 0$ we obtain for the impulse response:
The impulse response $h_{\rm K}(t)$ is obtained as the received signal $r(t)$ when there is a Dirac delta pulse at the input ⇒ $s(t) = δ(t)$. It follows that:
By definition, the channel frequency response $H_{\rm K}(f)$ is the Fourier transform of the impulse response $h_{\rm K}(t)$. With the shift theorem this results in: