Definition der Bitfehlerwahrscheinlichkeit

Die Grafik zeigt ein sehr einfaches, aber allgemeingültiges Modell eines binären Übertragungssystems. Dieses lässt sich wie folgt charakterisieren:
- Die Quelle und die Sinke werden durch die beiden Binärfolgen $〈q_ν〉$ und $〈v_ν〉$ beschrieben.
- Das gesamte Übertragungsystem – bestehend aus Sender, Übertragungskanal inklusive Störungen und Empfänger – wird als „Black Box” mit binärem Eingang und binärem Ausgang betrachtet.
- Dieser „Digitale Kanal” wird allein durch die Fehlerfolge $〈e_ν〉$ charakterisiert. Bei fehlerfreier Übertragung des $\nu$–ten Bits $(v_ν = q_ν)$ gilt $e_ν= 0$, andernfalls $(v_ν \ne q_ν)$ wird $e_ν= 1$ gesetzt.
$\text{Definition:}$ Die (mittlere) Bitfehlerwahrscheinlichkeit ist bei einem Binärsystem wie folgt gegeben:
- $$p_{\rm B} = {\rm E}[{\rm Pr}(v_{\nu} \ne q_{\nu})]= \overline{ {\rm Pr}(v_{\nu} \ne q_{\nu}) } =
\lim_{N \to\infty}\frac{1}{N}\cdot\sum\limits_{\nu=1}^{N}{\rm Pr}(v_{\nu}
\ne q_{\nu})\hspace{0.05cm}.$$ Diese statistische Größe ist das wichtigste Beurteilungskriterium eines jeden Digitalsystems.
Die Berechnung als Erwartungswert $\rm E[\text{...}]$ gemäß dem ersten Teil der obigen Gleichung entspricht einer Scharmittelung über die Verfälschungswahrscheinlichkeit ${\rm Pr}(v_{\nu} \ne q_{\nu})$ des $\nu$–ten Symbols, während die überstreichende Linie im rechten Gleichungsteil eine Zeitmittelung kennzeichnet. Beide Berechnungsarten führen – unter der gerechtfertigten Annahme ergodischer Prozesse – zum gleichen Ergebnis, wie im Hauptkapitel 4 ⇒ „Zufallsgrößen mit statistischen Bindungen” des Buches Stochastische Signaltheorie gezeigt wurde.
Auch aus der Fehlerfolge $〈e_ν〉$ lässt sich die Bitfehlerwahrscheinlichkeit als Erwartungswert bestimmen, wobei zu berücksichtigen ist, dass die Fehlergröße $e_ν$ nur die Werte $0$ und $1$ annehmen kann:
- $$\it p_{\rm B} = \rm E[\rm Pr(\it e_{\nu}=\rm 1)]= {\rm E}[{\it e_{\nu}}]\hspace{0.05cm}.$$
- Die obige Definition der Bitfehlerwahrscheinlichkeit gilt unabhängig davon, ob es statistische Bindungen innerhalb der Fehlerfolge $〈e_ν〉$ gibt oder nicht.
- Je nachdem ist der Aufwand zur Berechnung von $p_{\rm B}$ unterschiedlich groß und bei einer Systemsimulation müssen unterschiedliche digitale Kanalmodelle herangezogen werden.
Im Hauptkapitel 5 wird gezeigt, dass das sog. BSC–Modell (Binary Symmetrical Channel) statistisch unabhängige Fehler liefert, während für die Beschreibung von Bündelfehlerkanälen auf die Modelle von Gilbert–Elliott [Gil60][1] und von McCullough [McC68][2] zurückgegriffen werden muss.
Definition der Bitfehlerquote
Die Bitfehlerwahrscheinlichkeit $p_{\rm B}$ eignet sich zum Beispiel gut für die Konzipierung und Optimierung von Digitalsystemen. Diese ist eine Apriori-Kenngröße, die eine Vorhersage über das Fehlerverhalten eines Nachrichtensystems erlaubt, ohne dass dieses bereits realisiert sein muss.
Dagegen muss zur messtechnischen Erfassung der Qualität eines realisierten Systems oder bei einer Systemsimulation auf die Bitfehlerquote übergegangen werden, die durch den Vergleich von Quellensymbolfolge $〈q_ν〉$ und Sinkensymbolfolge $〈v_ν〉$ ermittelt wird. Diese ist somit eine Aposteriori-Kenngröße des Systems.
$\text{Definition:}$ Die Bitfehlerquote (englisch: Bit Error Rate, BER) ist das Verhältnis aus der Anzahl $n_{\rm B}(N)$ der aufgetretenen Bitfehler $(v_ν \ne q_ν)$ und der Anzahl $N$ der insgesamt übertragenen Symbole:
- $$h_{\rm B}(N) = \frac{n_{\rm B}(N)}{N} \hspace{0.05cm}.$$
Im Sinne der Wahrscheinlichkeitsrechnung ist die Bitfehlerquote eine relative Häufigkeit dar; sie wird deshalb auch Bitfehlerhäufigkeit genannt.
- Die Schreibweise $h_{\rm B}(N)$ soll deutlich machen, dass die per Messung oder durch Simulation ermittelte Bitfehlerquote signifikant von dem Parameter $N$ – also der Anzahl der insgesamt übertragenen oder simulierten Symbole – abhängt.
- Nach den elementaren Gesetzen der Wahrscheinlichkeitsrechnung stimmt nur im Grenzfall $N \to \infty$ die Aposteriori–Kenngröße $h_{\rm B}(N\to \infty)$ mit der Apriori–Kenngröße $p_{\rm B}$ exakt überein.
Der Zusammenhang zwischen Wahrscheinlichkeit und relativer Häufigkeit wird im LernvideoBernoullisches Gesetz der großen Zahlen verdeutlicht.
Bitfehlerwahrscheinlichkeit und Bitfehlerquote beim BSC-Modell
Für die nachfolgenden Herleitungen wird das BSC–Modell (Binary Symmettric Channel) zugrunde gelegt, das in Kapitel 5.2 im Detail beschrieben wird.
- Jedes einzelne Bit wird mit der Wahrscheinlichkeit $p = {\rm Pr}(v_{\nu} \ne q_{\nu}) = {\rm Pr}(e_{\nu} = 1)$ verfälscht, unabhängig von den Fehlerwahrscheinlichkeiten der benachbarten Symbole.
- Die (mittlere) Bitfehlerwahrscheinlichkeit $p_{\rm B}$ ist somit ebenfalls gleich $p$.
Abgeschätzt werden soll, wie genau die Bitfehlerwahrscheinlichkeit $p_{\rm B} = p$ beim BSC-Modell durch die Bitfehlerquote $h_{\rm B}(N)$ approximiert wird. Dies geschieht in mehreren Schritten:
- Die Anzahl der Bitfehler bei der Übertragung von $N$ Symbolen ist eine diskrete Zufallsgröße::
- $$n_{\rm B}(N) = \sum\limits_{\it \nu=\rm 1}^{\it N} e_{\nu} \hspace{0.2cm} \in \hspace{0.2cm} \{0, 1, \hspace{0.05cm}\text{...} \hspace{0.05cm} , N \}\hspace{0.05cm}.$$
- Bei statistisch unabhängigen Fehlern (BSC) ist $n_{\rm B}(N)$ binominalverteilt. Demzufolge gilt:
- $$m_{n{\rm B}}=N \cdot p_{\rm B},\hspace{0.2cm}\sigma_{n{\rm B}}=\sqrt{N\cdot p_{\rm B}\cdot (\rm 1- \it p_{\rm B})}\hspace{0.05cm}.$$
- Für Mittelwert und Streuung der Bitfehlerquote $h_{\rm B}(N)= n_{\rm B}(N)/N$ gilt deshalb::
[math]\displaystyle{ m_{h{\rm B}}= \frac{m_{n{\rm B}}}{N} = p_{\rm B}\hspace{0.05cm},\hspace{0.2cm}\sigma_{h{\rm B}}= \frac{\sigma_{n{\rm B}}}{N}= \sqrt{\frac{ p_{\rm B}\cdot (\rm 1- \it p_{\rm B})}{N}}\hspace{0.05cm}. }[/math]
[math]\displaystyle{ f_{h{\rm B}}({h_{\rm B}}) \approx \frac{1}{\sqrt{2\pi}\cdot\sigma_{h{\rm B}}}\cdot {\rm exp} \left[-\frac{(h_{\rm B}-p_{\rm B})^2}{2 \cdot \sigma_{h{\rm B}}^2}\right]. }[/math]
- Mit dem Gaußschen Fehlerintergal ${\rm Q}(x)$ lässt sich so die Wahrscheinlichkeit $p_\varepsilon$ berechnen, dass die per Simulation/Messung über $N$ Symbole ermittelte Bitfehlerquote $h_{\rm B}(N)$ betragsmäßig um weniger als einen Wert $\varepsilon$ von der tatsächlichen Bitfehlerwahrscheinlichkeit $p_{\rm B}$ abweicht:
- $$p_{\varepsilon}= {\rm Pr} \left( |h_{\rm B}(N) - p_{\rm B}| < \varepsilon \right)
= 1 -2 \cdot {\rm Q} \left( \frac{\varepsilon}{\sigma_{h{\rm B}}} \right)=
1 -2 \cdot {\rm Q} \left( \frac{\varepsilon \cdot \sqrt{N}}{\sqrt{p_{\rm B} \cdot (1-p_{\rm B})}} \right)\hspace{0.05cm}.$$
$\text{Fazit:}$ Dieses Ergebnis ist wie folgt zu interpretieren:
- Wenn man unendlich viele Versuchsreihen über jeweils $N$ Symbole durchführt, ist der Mittelwert $m_{h{\rm B} }$ tatsächlich gleich der gesuchten Fehlerwahrscheinlichkeit $p_{\rm B}$.
- Bei einer einzigen Versuchsreihe wird man dagegen nur eine Näherung erhalten, wobei die jeweilige Abweichung vom Sollwert bei mehreren Versuchsreihen gaußverteilt ist.
$\text{Beispiel 1:}$ Die Bitfehlerwahrscheinlichkeit betrage $p_{\rm B}= 10^{-3}$ und es ist bekannt, dass die Bitfehler statistisch unabhängig sind.
- Macht man nun sehr viele Versuchsreihen mit jeweils $N= 10^{5}$ Symbolen, so werden die jeweiligen Ergebnisse $h_{\rm B}(N)$ entsprechend einer Gaußverteilung um den Sollwert $10^{-3}$ variieren.
- Die Streuung beträgt dabei $\sigma_{h{\rm B} }= \sqrt{ { p_{\rm B}\cdot (\rm 1- \it p_{\rm B})}/{N} }\approx 10^{-4}\hspace{0.05cm}.$
- Die Wahrscheinlichkeit, dass die relative Häufigkeit einen Wert zwischen $0.9 \cdot 10^{-3}$ und $1.1 \cdot 10^{-3}$ haben wird $(\varepsilon=10^{-4})$, ist somit gleich $p_{\varepsilon} = 1 - 2 \cdot {\rm Q} \left({\varepsilon}/{\sigma_{h{\rm B} } } \right )= 1 - 2 \cdot {\rm Q} (1) \approx 68.4\%$.
- Soll diese Wahrscheinlichkeit (Genauigkeit) auf $95\%$ gesteigert werden, so wären $N = 400\hspace{0.05cm}000$ Symbole erforderlich.
Fehlerwahrscheinlichkeit bei Gaußschem Rauschen
Entsprechend den Voraussetzungen zu diesem Kapitel gehen wir von folgenden Annahmen aus:
- Das Detektionssignal zu den Detektionszeitpunkten kann wie folgt dargestellt werden: $ d(\nu T) = d_{\rm S}(\nu T)+d_{\rm N}(\nu T)\hspace{0.05cm}. $
- Der Nutzanteil wird durch die Wahrscheinlichkeitsdichtefunktion (WDF) $f_{d{\rm S}}(d_{\rm S}) $ beschrieben, wobei wir hier von unterschiedlichen Auftrittswahrscheinlichkeiten $p_{\rm L} = {\rm Pr}(d_{\rm S} = -s_0)$ und $p_{\rm H} = {\rm Pr}(d_{\rm S} = +s_0)= 1-p_{\rm L}$ ausgehen.
- Die WDF $f_{d{\rm N}}(d_{\rm N})$ der Störkomponente ist gaußförmig und besitzt die Streuung $\sigma_d$.
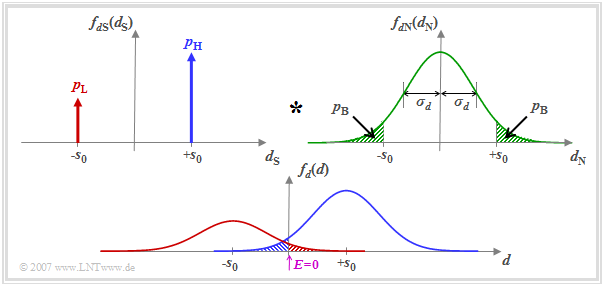
Fehlerwahrscheinlichkeit bei Gaußschem Rauschen

Unter der Voraussetzung, dass $d_{\rm S}(\nu T)$ und $d_{\rm N}(\nu T)$ statistisch unabhängig voneinander sind („signalunabhängiges Rauschen”), ergibt sich die WDF $f_d(d) $ der Detektionsabtastwerte $d(\nu T)$ als das Faltungsprodukt $f_d(d) = f_{d{\rm S}}(d_{\rm S}) \star f_{d{\rm N}}(d_{\rm N})\hspace{0.05cm}.$
Der Schwellenwertentscheider mit der Schwelle $E = 0$ trifft immer dann eine falsche Entscheidung, wenn
- das Symbol $\rm L$ gesendet wurde (d_{\rm S} = -s_0) und $d > 0$ ist (rote schraffierte Fläche), oder
- das Symbol $\rm H$ gesendet wurde (d_{\rm S} = +s_0) und $d < 0$ ist (blaue schraffierte Fläche).
Da die Flächen der roten und der blauen Gaußkurven zusammen $1$ ergeben, gibt die Summe aus der rot und der blau schraffierten Fläche die Bitfehlerwahrscheinlichkeit $p_{\rm B}$ an. Die beiden grün schraffierten Flächen in der oberen Wahrscheinlichkeitsdichtefunktion $f_{d{\rm N}}(d_{\rm N})$ sind – jede für sich – ebenfalls gleich $p_{\rm B}$.
Die anhand der Grafik veranschaulichten Ergebnisse sollen nun formelmäßig hergeleitet werden. Ausgegangen wird von der Gleichung
- $$p_{\rm B} = p_{\rm L} \cdot {\rm Pr}( v_\nu = \mathbf{H}\hspace{0.1cm}|\hspace{0.1cm} q_\nu = \mathbf{L})+
p_{\rm H} \cdot {\rm Pr}(v_\nu = \mathbf{L}\hspace{0.1cm}|\hspace{0.1cm} q_\nu = \mathbf{H})\hspace{0.05cm}.$$
- Hierbei sind $p_{\rm L} $ und $p_{\rm H} $ die Quellensymbolwahrscheinlichkeiten. Die jeweils zweiten (bedingten) Wahrscheinlichkeiten $ {\rm Pr}( v_\nu \hspace{0.05cm}|\hspace{0.05cm} q_\nu)$ beschreiben die Verfälschungen durch den AWGN–Kanal. Aus der Entscheidungsregel des Schwellenwertentscheiders (mit Schwelle $E = 0$) ergibt sich auch:
- $$p_{\rm B} = p_{\rm L} \cdot {\rm Pr}( d(\nu T)>0)+ p_{\rm H} \cdot {\rm Pr}( d(\nu T)<0) =p_{\rm L} \cdot {\rm Pr}( d_{\rm N}(\nu T)>s_0)+ p_{\rm H} \cdot {\rm Pr}( d_{\rm N}(\nu T)<-s_0) \hspace{0.05cm}.$$
- Die beiden Überschreitungswahrscheinlichkeiten in obiger Gleichung sind aufgrund der Symmetrie der Gaußschen WDF $f_{d{\rm N}}(d_{\rm N})$ gleich. Es gilt:
- $$p_{\rm B} = (p_{\rm L} + p_{\rm H}) \cdot {\rm Pr}( d_{\rm N}(\nu T)>s_0) = {\rm Pr}( d_{\rm N}(\nu T)>s_0)\hspace{0.05cm}.$$
- Das bedeutet: $p_{\rm B}$ hängt bei einem Binärsystem mit der Schwelle $E = 0$ nicht von den Symbolwahrscheinlichkeiten $p_{\rm L} $ und $p_{\rm H} = 1- p_{\rm L}$ ab.
- Die Wahrscheinlichkeit, dass der AWGN–Rauschterm $d_{\rm N}$ mit Streuung $\sigma_d$ größer ist als die NRZ–Sendeimpulsamplitude $s_0$, ergibt sich damit zu:
- $$p_{\rm B} = \int_{s_0}^{+\infty}f_{d{\rm N}}(d_{\rm N})\,{\rm d} d_{\rm N} =
\frac{\rm 1}{\sqrt{2\pi} \cdot \sigma_d}\int_{
s_0}^{+\infty}{\rm exp} \left [-\frac{d_{\rm N}^2}{2\sigma_d^2} \right ]\,{\rm d} d_{\rm N}\hspace{0.05cm}.$$
- Unter Verwendung des komplementären Gaußschen Fehlerintegrals ${\rm Q}(x)$ lautet das Ergebnis:
- $$p_{\rm B} = {\rm Q} \left( \frac{s_0}{\sigma_d}\right)\hspace{0.4cm}{\rm mit}\hspace{0.4cm}\rm Q (\it x) = \frac{\rm 1}{\sqrt{\rm 2\pi}}\int_{\it
x}^{+\infty}\rm e^{\it -u^{\rm 2}/\rm 2}\,d \it u \hspace{0.05cm}.$$
- Häufig – insbesondere in der englischsprachigen Literatur – wird anstelle der Funktion ${\rm Q}(x)$ die vergleichbare komplementäre Error Function ${\rm erfc}(x)$ verwendet. Mit dieser gilt:
- $$p_{\rm B} = {1}/{2} \cdot {\rm erfc} \left( \frac{s_0}{\sqrt{2}\cdot \sigma_d}\right)\hspace{0.4cm}{\rm mit}\hspace{0.4cm}
{\rm erfc} (\it x) = \frac{\rm 2}{\sqrt{\rm \pi}}\int_{\it
x}^{+\infty}\rm e^{\it -u^{\rm 2}}\,d \it u \hspace{0.05cm}.$$
Beide Funktionen findet man in Formelsammlungen in tabellarischer Form. Sie können zur Berechnung der Funktionswerte von ${\rm Q}(x)$ und $1/2 \cdot {\rm erfc}(x)$ aber auch unser Interaktionsmodul Komplementäre Gaußsche Fehlerfunktionen benutzen.
$\text{Beispiel 2:}$ Für das Folgende wird vorausgesetzt, dass Tabellen zur Verfügung stehen, in denen das Argument der Gaußschen Fehlerfunktionen im Abstand $0.1$ aufgelistet sind. Mit $s_0/\sigma_d = 4$ erhält man für die Bitfehlerwahrscheinlichkeit gemäß der Q–Funktion:
- $$p_{\rm B} = {\rm Q} (4) = 0.317 \cdot 10^{-4}\hspace{0.05cm}.$$
Nach der zweiten Gleichung ergibt sich:
- $$p_{\rm B} = {1}/{2} \cdot {\rm erfc} ( {4}/{\sqrt{2} })= {1}/{2} \cdot {\rm erfc} ( 2.828)\approx {1}/{2} \cdot {\rm erfc} ( 2.8)= 0.375 \cdot 10^{-4}\hspace{0.05cm}.$$
Richtig ist der erste Wert. Bei der zweiten Berechnungsart muss man runden oder – noch besser – interpolieren, was aufgrund der starken Nichtlinearität dieser Funktion sehr schwierig ist.
Bei den gegebenen Zahlenwerten ist demnach Q–Funktion besser geeignet. Außerhalb von Übungsbeispielen wird $s_0/\sigma_d$ in der Regel einen „krummen” Wert besitzen. In diesem Fall bietet die Q–Funktion natürlich keinen Vorteil gegenüber „erfc(x)”.
Optimaler Binärempfänger - Realisierung mit Matched-Filter
Für das Folgende wird von den im Kapitel 1.1 genannten Voraussetzungen ausgegangen. Dann kann man für den Frequenzgang und die Impulsantwort des Empfängerfilters ansetzen::
[math]\displaystyle{ H_{\rm E}(f) = {\rm si}(\pi f T) \hspace{0.4cm}\bullet\!\!-\!\!\!-\!\!\!-\!\!\circ \hspace{0.4cm} h_{\rm E}(t) = \left\{ \begin{array}{c} 1/T \\
1/(2T) \\ 0 \\ \end{array} \right.\quad
\begin{array}{*{1}c} {\rm{f\ddot{u}r}}
\\ {\rm{f\ddot{u}r}} \\ {\rm{f\ddot{u}r}} \\ \end{array}\begin{array}{*{20}c}
|\hspace{0.05cm}t\hspace{0.05cm}|< T/2 \hspace{0.05cm},\\
|\hspace{0.05cm}t\hspace{0.05cm}|= T/2 \hspace{0.05cm},\\
|\hspace{0.05cm}t\hspace{0.05cm}|>T/2 \hspace{0.05cm}. \\
\end{array} }[/math]
Aufgrund der Linearität kann für das Detektionsnutzsignal geschrieben werden::
[math]\displaystyle{ d_{\rm S}(t) = \sum_{(\nu)} a_\nu \cdot g_d ( t - \nu \cdot T)\hspace{0.4cm}{\rm mit}\hspace{0.4cm}g_d(t) = g_s(t) \star h_{\rm E}(t) \hspace{0.05cm}. }[/math]
Die Faltung zweier Rechtecke gleicher Breite T ergibt einen dreieckförmigen Detektionsgrundimpuls gd(t) mit
gd(t = 0) = s0.
Wegen gd(|t| ≥ T) = 0 ist das System
impulsinterferenzfrei; es gilt dS(νT) = ±s0.

Die Varianz des Detektionsstörsignals dN(t) – also die Detektionsstörleistung – lautet::
[math]\displaystyle{ \sigma _d ^2 = \frac{N_0 }{2} \cdot \int_{ - \infty }^{
+ \infty } {\left| {H_{\rm E}( f )} \right|^2
\hspace{0.1cm}{\rm{d}}f} = \frac{N_0 }{2} \cdot \int_{-
\infty }^{+ \infty } {\rm si}^2(\pi f T)\hspace{0.1cm}{\rm{d}}f =
\frac{N_0 }{2T} \hspace{0.05cm}. }[/math]
Damit ergeben sich für die Bitfehlerwahrscheinlichkeit folgende Gleichungen::
[math]\displaystyle{ p_{\rm B} = {\rm Q} \left( \sqrt{\frac{2 \cdot s_0^2 \cdot T}{N_0}}\right)= {\rm Q} \left(
\sqrt{\rho_d}\right)\hspace{0.05cm}, }[/math]
- [math]\displaystyle{ p_{\rm B} = {1}/{2} \cdot {\rm erfc} \left( \sqrt{{ s_0^2 \cdot T}/{N_0}}\right)= {1}/{2}\cdot {\rm erfc}\left( \sqrt{{\rho_d}/{2}}\right) \hspace{0.05cm}. }[/math]
ρd ist das momentane Signal–zu–Stör–Leistungsverhältnis (SNR) des Detektionssignals d(t) zu den Zeitpunkten νT. Wir nennen es im Folgenden kurz „Detektions–SNR”. Es gilt die Definition: [math]\displaystyle{ \rho_d = \frac{d_{\rm S}^2(\nu T)}{{\rm E}[d_{\rm N}^2(\nu T)]}= \frac{s_0^2}{\sigma _d ^2} \hspace{0.05cm}. }[/math]
Optimaler Binärempfänger - Realisierung mit Matched-Filter (2)
Ein Vergleich der Ergebnisse der letzten Seite mit Kapitel 5.4 von Buch „Stochastische Signaltheorie” zeigt, dass das Empfangsfilter
HE(f) ein an den Sendegrundimpuls gs(t) angepasstes Matched–Filter ist::
[math]\displaystyle{ H_{\rm E}(f) = H_{\rm MF}(f) = K_{\rm MF}\cdot G_s^*(f)\hspace{0.05cm}. }[/math]
Gegenüber der Seite Matched–Filter–Optimierung sind hier folgende Modifikationen berücksichtigt:
- Die Matched–Filter–Konstante ist hier zu KMF = 1/(s0 · T) gesetzt. Damit ist der Frequenzgang HMF(f) dimensionslos.
- Der im allgemeinen frei wählbare Detektionszeitpunkt ist hier zu TD = 0 gewählt. Damit ergibt sich allerdings ein akausales Filter.
- Das Detektions–SNR kann für jeden beliebigen Sendegrundimpuls gs(t) mit Spektrum Gs(f) wie folgt dargestellt werden, wobei sich die rechte Identität aus dem Parsevalschen Theorem ergibt::
[math]\displaystyle{ \rho_d = \frac{2 \cdot E_{\rm B}}{N_0}\hspace{0.4cm}{\rm mit}\hspace{0.4cm} E_{\rm B} = \int^{+\infty} _{-\infty} g_s^2(t)\,{\rm d}t = \int^{+\infty} _{-\infty} |G_s(f)|^2\,{\rm d}f\hspace{0.05cm}. }[/math]
- EB wird oft als Energie pro Bit bezeichnet und EB/N0 – fälschlicherweise – als SNR. Bei binärer Basisbandübertragung unterscheidet sich EB/N0 vom tatsächlichen SNR ρd um den Faktor 2.
- Die auf der letzten Seite hergeleitete Bitfehlerwahrscheinlichkeit kann somit auch in der folgenden Weise geschrieben werden::
[math]\displaystyle{ p_{\rm B} = {\rm Q} \left( \sqrt{{2 \cdot E_{\rm B}}/{N_0}}\right)= {1}/{2} \cdot{\rm erfc} \left( \sqrt{{E_{\rm B}}/{N_0}}\right) \hspace{0.05cm}. }[/math] Die Eigenschaften des Matched-Filters werden in folgendem Interaktionsmodul behandelt: Zur Verdeutlichung des Matched-Filters.
Optimaler Binärempfänger – Realisierungsform „Integrate & Dump”
Bei rechteckförmigen NRZ–Sendeimpulsen kann das Matched–Filter auch als Integrator (jeweils über eine Symboldauer T) realisiert werden. Damit gilt für das Detektionssignal zu den Detektionszeitpunkten::
[math]\displaystyle{ d(\nu \cdot T + T/2) = \frac {1}{T} \cdot \int^{\nu \cdot T + T/2} _{\nu \cdot T - T/2} r(t)\,{\rm
d}t \hspace{0.05cm}. }[/math]
Die folgende Grafik verdeutlicht die Unterschiede bei der Realisierung des optimalen Binärempfängers mit Matched–Filter (MF) ⇒ mittlere Skizze bzw. als „Integrate & Dump” (I&D) ⇒ untere Skizze.

Man erkennt aus diesen Signalverläufen:
- Das Detektionsnutzsignal dS(t) ist zu den Detektionszeitpunkten in beiden Fällen gleich ±s0.
- Die unterschiedlichen Detektionszeitpunkte sind darauf zurückzuführen, dass das Matched–Filter im Gegensatz zu „Integrate & Dump” als akausal angesetzt wurde (siehe letzte Seite).
- Beim MF–Empfänger ist die Varianz des Detektionsstörsignals zu allen Zeiten t gleich::
[math]\displaystyle{ {\rm E}[d_{\rm N}^2(t)]= {\sigma _d ^2} = {\rm const.} }[/math]
- Dagegen nimmt beim I&D–Empfänger die Varianz von Symbolanfang bis Symbolende zu.
- Zu den Detektionszeitpunkten νT ist die Detektionsstörleistung in beiden Fällen gleich, so dass sich die genau gleiche Bitfehlerwahrscheinlichkeit ergibt. Mit EB = s02 · T gilt nämlich::
[math]\displaystyle{ \sigma _d ^2 = \frac{N_0}{2} \cdot \int_{- \infty }^{ +\infty } {\rm si}^2(\pi f T)\hspace{0.1cm}{\rm{d}}f = \frac{N_0}{2T} \hspace{0.05cm}\hspace{0.2cm} \Rightarrow \hspace{0.2cm} p_{\rm B} = {\rm Q} \left( \sqrt{ s_0^2 / \sigma _d ^2} \right)= {\rm Q} \left( \sqrt{{2 \cdot E_{\rm B}}/{N_0}}\right) \hspace{0.05cm}. }[/math]
Interpretation des optimalen Empfängers
In diesem Abschnitt wurde gezeigt, dass mit einem Empfänger, bestehend aus linearem Empfangsfilter und nichtlinearem Entscheider, die kleinstmögliche Bitfehlerwahrscheinlichkeit zu erreichen ist::
[math]\displaystyle{ p_{\rm B, \hspace{0.05cm}min} = {\rm Q} \left( \sqrt{{2 \cdot E_{\rm B}}/{N_0}}\right)
= {1}/{2} \cdot {\rm erfc} \left( \sqrt{{ E_{\rm B}}/{N_0}}\right) \hspace{0.05cm}. }[/math]
Die sich ergebende Konfiguration ist ein Sonderfall des sog. Maximum–Aposteriori–Empfängers (MAP), der im Kapitel 3.7 dieses Buches behandelt wird.
Für die Gültigkeit obiger Gleichung müssen allerdings eine Reihe von Voraussetzungen erfüllt sein::
- Das Sendesignal s(t) ist binär sowie bipolar (antipodisch) und weist pro Bit die (mittlere) Energie EB auf. Die (mittlere) Sendeleistung ist somit EB/T.
- Es liegt ein AWGN–Kanal (Additive White Gaussian Noise) mit der konstanten (einseitigen) Rauschleistungsdichte N0 vor.
- Das Empfangsfilter HE(f) ist bestmöglich an das Sendegrundimpulsspektrum Gs(f) entsprechend dem Matched–Filter–Kriterium angepasst.
- Der Entscheider (Schwellenwert, Detektionszeitpunkte) sei optimal. Eine kausale Realisierung des Matched–Filters kann man durch Verschiebung des Detektionszeitpunktes ausgleichen.
- Obige Gleichung gilt unabhängig vom Sendegrundimpuls gs(t). Allein die für die Übertragung eines Binärsymbols aufgewendete Energie EB ist entscheidend für die Fehlerwahrscheinlichkeit.
- Voraussetzung für die Anwendbarkeit obiger Gleichung ist, dass die Detektion eines Symbols nicht durch andere Symbole beeinträchtigt wird. Solche Impulsinterferenzen vergrößern pB enorm.
- Ist die absolute Sendeimpulsdauer TS kleiner oder gleich dem Symbolabstand T, so ist obige Gleichung bei Erfüllung des Matched-Filter-Kriteriums immer anwendbar.
- Die Gleichung gilt auch für Nyquistsysteme, bei denen zwar TS > T gilt, es aber aufgrund von äquidistanten Nulldurchgängen des Grundimpulses gd(t) nicht zu Impulsinterferenzen kommt.
Aufgaben
Zusatzaufgaben:1.2 Bitfehlermessung
A1.3 Einfluss von g(s) von (t) und h(E) von (t)
Zusatzaufgaben:1.3 Schwellenwertoptimierung
Quellenverzeichnis